作成:2023年〜
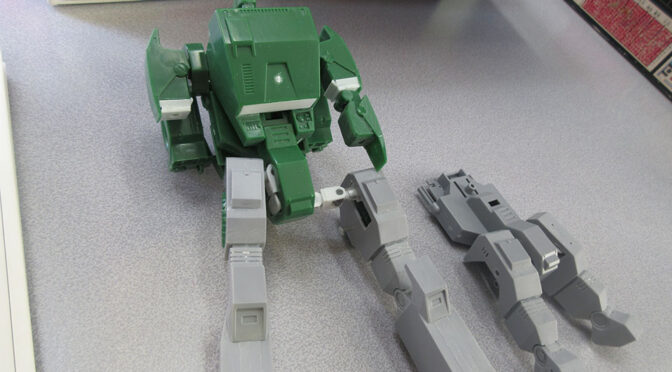
アオシマから透明パーツを追加して再販された可変キャリバーを作るよ。
 とりあえず変形はする。
とりあえず変形はする。
でも立ちポーズが安定しない。
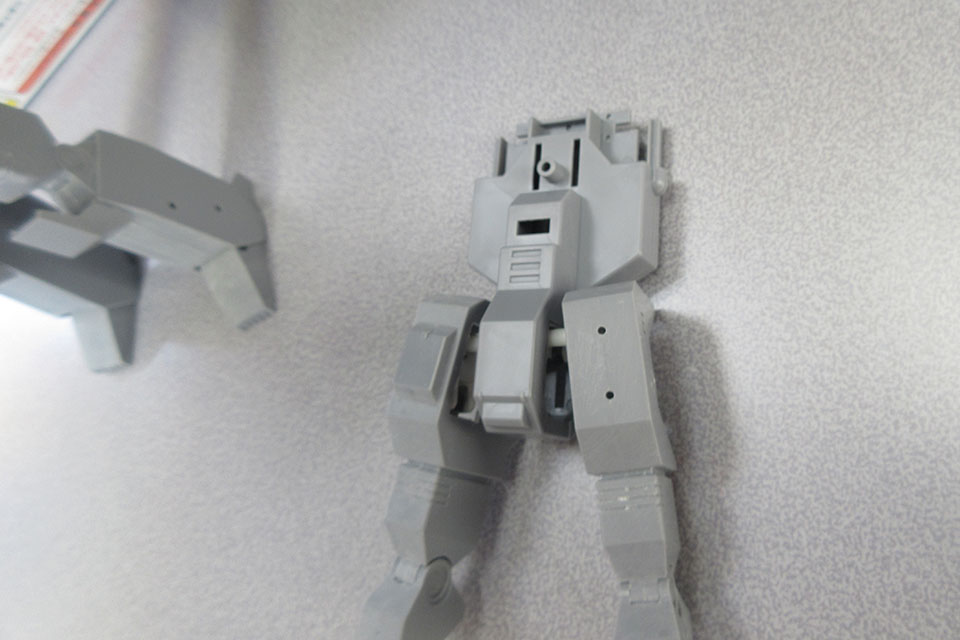
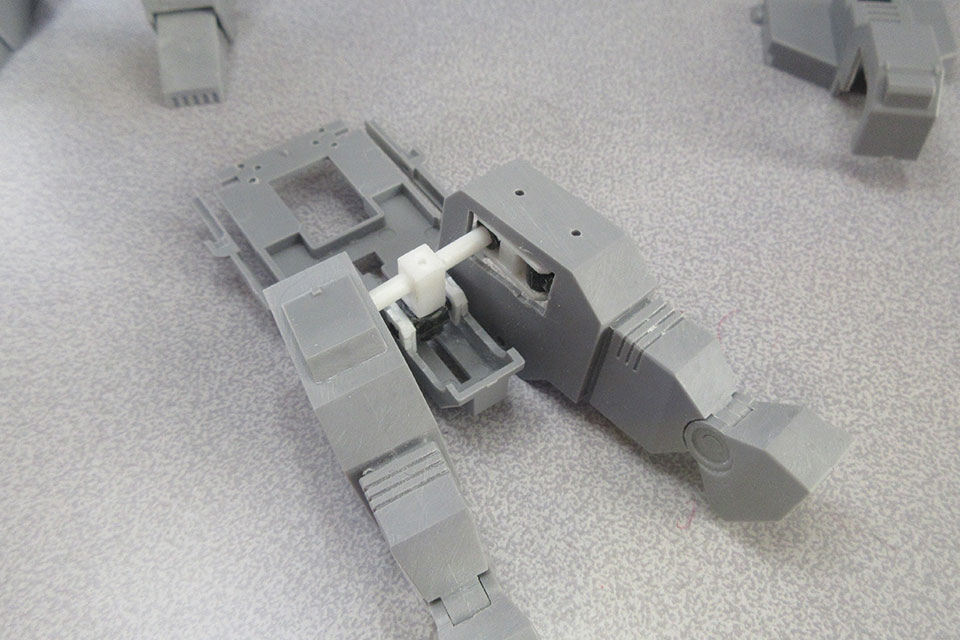
両足で8つ使っていたのを、5個に減らした。ついでに足がカッコよく開くように、股関節の軸の長さを確保する。
 ムゲンキャリバーも一緒につくっています。
ムゲンキャリバーも一緒につくっています。
 キットの上半身は差し替え変形になっている。
キットの上半身は差し替え変形になっている。
車両とロボットで、頭を挿す位置が違う。そのほかは変形するのにここだけ差し替えなのが実に惜しい。
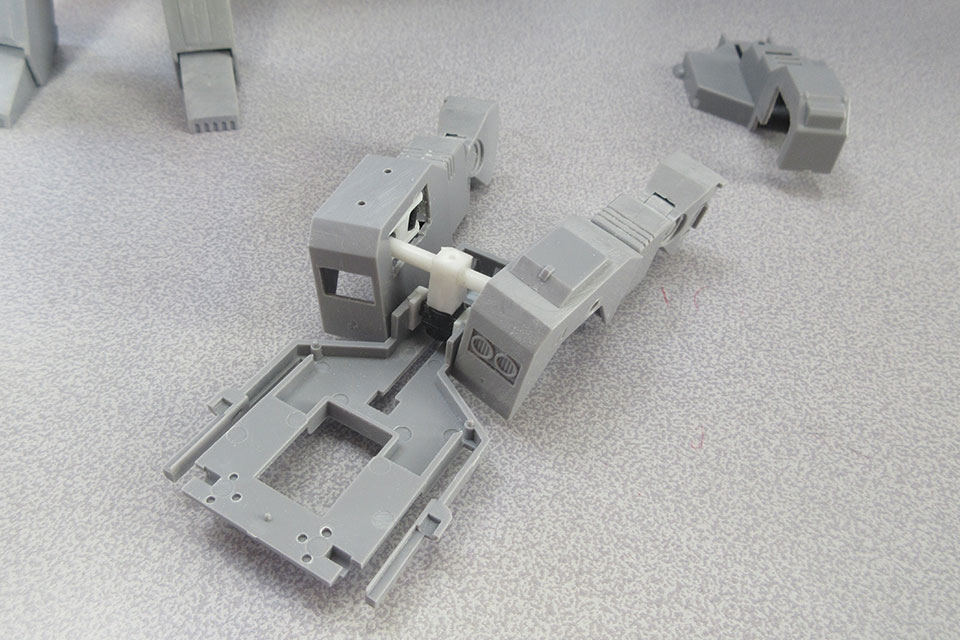
ということで、完全変形にすべく、フレキシブルな関節で接続。ムリヤリ変形である。
トイに準じて1軸の関節で作ればラクなんだが、調べてみるとパーツ構造が全然違ってて、なんの参考にもならなかった。
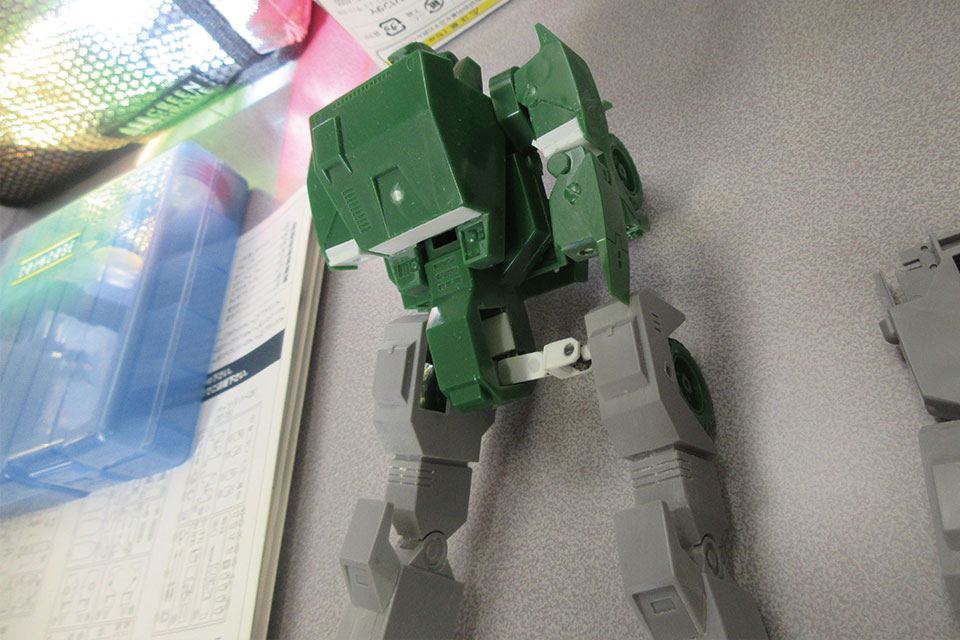
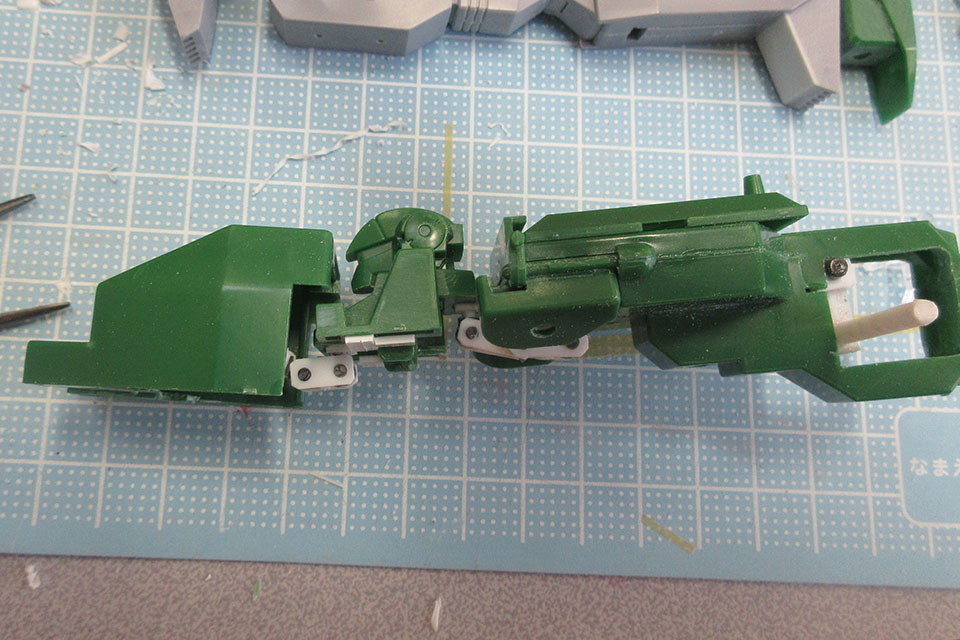
 現在こんな感じ。
現在こんな感じ。
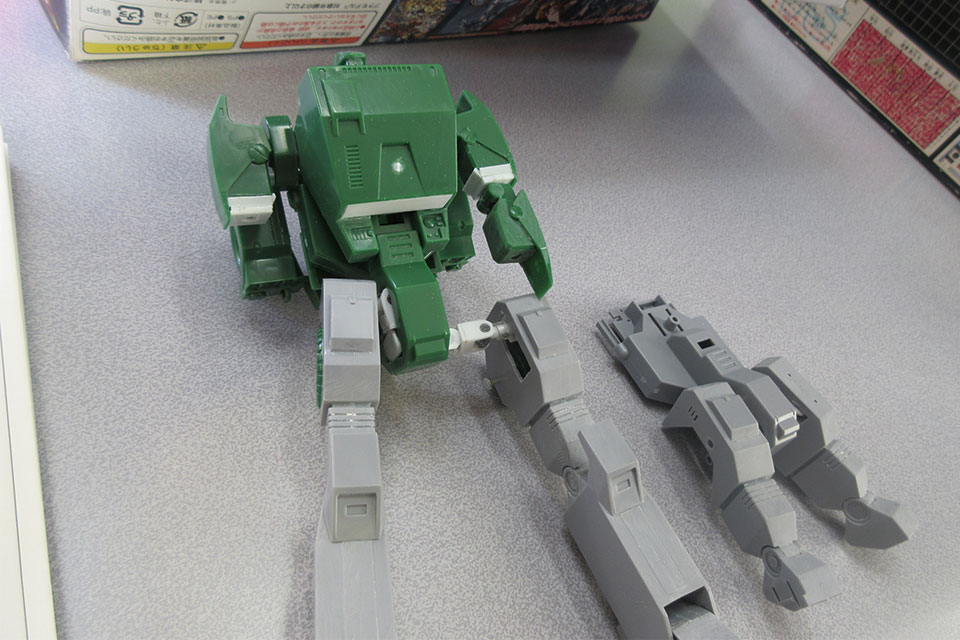
アオシマ版は新規パーツとして、ムゲンキャリバー用のライフルと右の握り手首、左の平手が付いてます。あと変形できなくなるけどフロントガラスも透明パーツ化されている。
写真は立ってますが、関節ゆるゆるで自立できてません。壁に立てかけてる。なにか対策を考えよう。
腕は2mmほど延長したけどまだ短めかな。
そして肩の取り付け位置が下すぎる。ここを改善すると、腕をさらに伸ばさないといけなくなる。うーむ。
この辺は次回の課題だな…
つづく。